지난 번에 1차로 테스트한 900:1 감속기어의 경우 출력 각속도가 균일하지 않은 문제가 발생하여, 그 디자인은 폐기하였습니다.
그 후에 문제가 뭘까… 고민을 좀 해봤습니다. 곰곰히 생각해보니 일단 2가지로 원인을 파악했는데,
첫번째는 일단 기어의 크기가 크다는 것이었습니다. 그로 인해, 각속도의 차이가 너무 현저하게 나타난다는 문제가 있다는 것이었습니다.
두번째는 출력단의 각속도가 Cycloid 기어 하나에 의해 결정되는 구조로 인해, 이빨 하나의 오차나 각속도의 변화가 출력 각속도에 그대로 투영된다는 문제가 있다는 것이었습니다.
첫번째의 경우 일단 좀더 기어 이를 더 작게 제작하는 방향으로 가닥을 잡았는데, 두번째의 경우 어떻게 Cycloid 기어에서 발생하는 오차를 상쇄할 수 있겠느냐는 것으로 고민을 좀 했습니다.
아래는 감속 기어비가 큰 Harmonic 드라이브라는 구동방식에 대한 설명을 하고 있는 동영상입니다. 이 구동방식도 감속 기어비가 크고, 시스템의 크기가 작은 장점을 가지고 있는데, 핵심은 Flexspline 이라는 신축성을 가진 금속 이빨이 Circular Spine 이 가지는 이빨보다 더 작은 이빨 수를 가지고 Cycloid 기어처럼 내측을 운동하면서 이빨 수 차이가 느린 출력 회전속도를 만들어낸다는 것입니다.
다만 이 방식은 Cycloid 기어처럼 동심원을 벗어난 기어가 캠으로 회전운동을 하면서 내부 기어와 외부기어가 맞닿도록 하는 형태가 아니고, 신축성이 있는 금속의 통을 Wave Generator라고 하는 타원형의 구조를 가진 구조체에 끼워 넣고 딱 2개의 지점만이 외측기어에 닿게 하는 형태를 가지고 있습니다. 이 Harmonic 드라이브는 각종 정밀 제어 구동에 사용하고 있습니다. 어떤 이는 이 Harmonic 드라이브 박스를 이용하여, 천체망원경의 적도의에 사용하고 있으니, 일단 구조적으로 스타트랙커에 이용할 정도의 정밀도는 뽑아준다는 것입니다.
그럼, 어차피 기어가 직접 물리는 방식이라는 것은 같은데, 왜 Harmonic 드라이브는 되는데, 제가 제작한 Cycloid 기어는 각속도가 일정하지 않을까… 그래서 도달한 결론이 그럼, 하나의 기어에서 발생하는 각속도의 오차를 보정할 수 있도록 이중 기어를 물리도록 해보자…
아래 동영상을 보시면 Cycloid 기어에 2개의 디스크가 장착되어 구동되는 모습을 보여줍니다.
서로 다른 위상으로 작동하는 2개의 Cycloid 디스크가 하나의 출력을 만들어내고 있습니다.
이 방법에 착안하여, 저는 3개의 디스크로 하나의 출력을 만들어내도록 하는 Cycloidal Gear를 계획했습니다.
아래는 기본 Cycloidal Gear의 디자인입니다. 기어는 60:1 감속비를 갖고, 좀더 튼실한 출력을 위해, 출력 샤프트의 크기를 많이 키웠습니다.
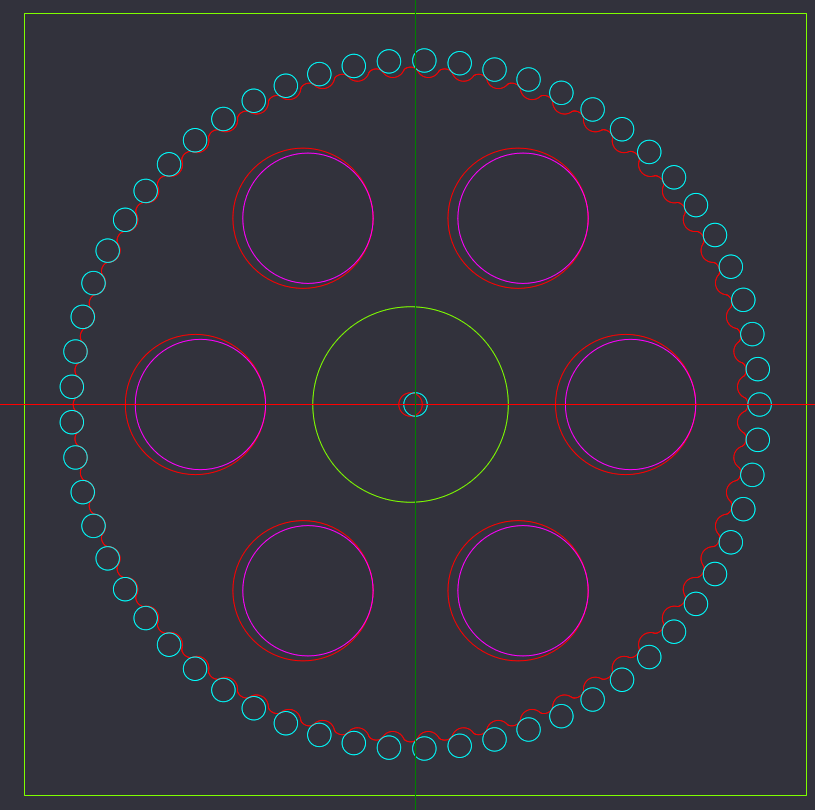
이 디자인을 이용하여 Cycloidal 디스크를 3개를 가지는 기어박스를 디자인했습니다.
기본 디자인은 지난번과 거의 같습니다. 그러나 2단 구조는 아니고, 1단 구조이고, 마찰로 인한 오차를 줄이기 위해 플라스틱 부품이 맞닿는 모든 곳엔 볼베어링을 사용했습니다. 그리고 지난번 제작하면서 발견했던 소소만 문제들에 대한 수정내용을 반영했습니다.
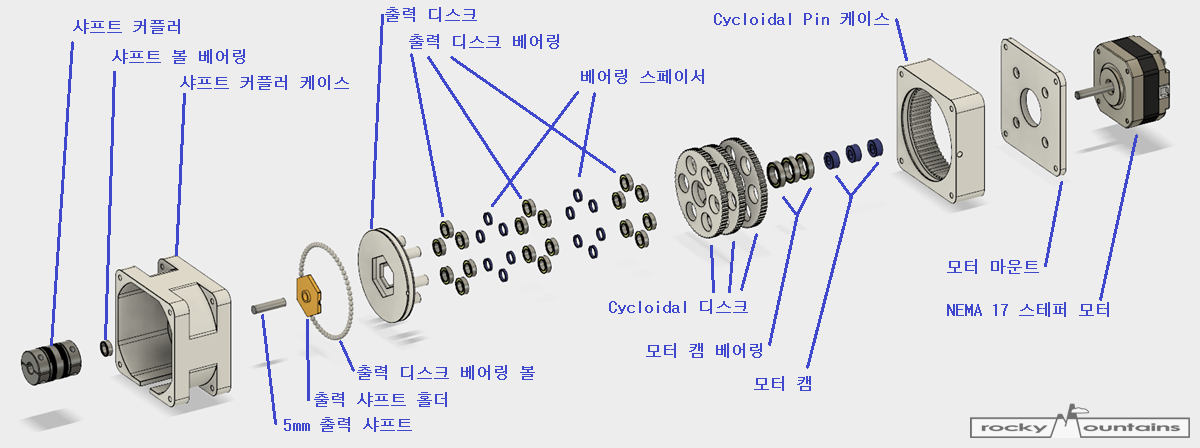
아래는 디자인과, 각 부분의 구조입니다.
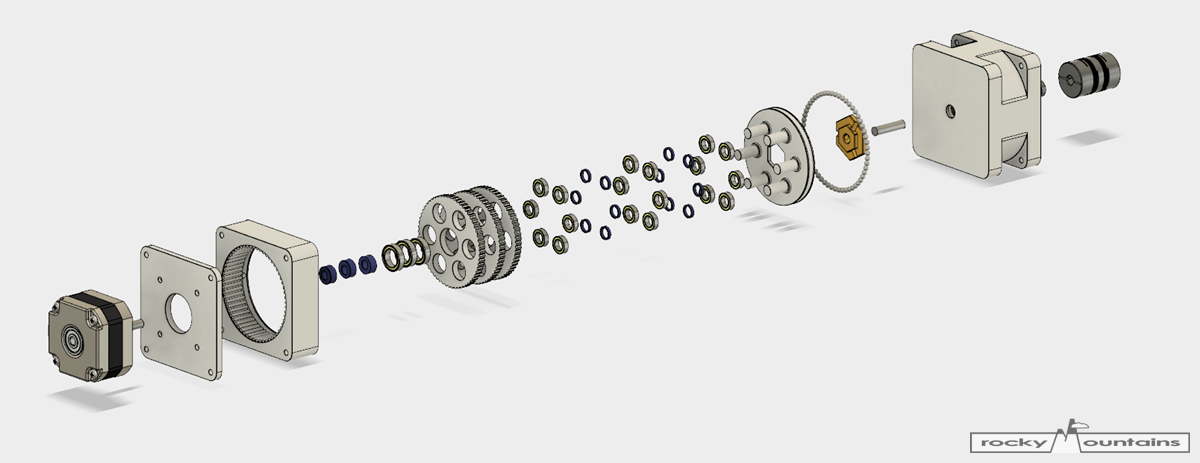
아래는 반대 각도에서 본 부품들입니다.
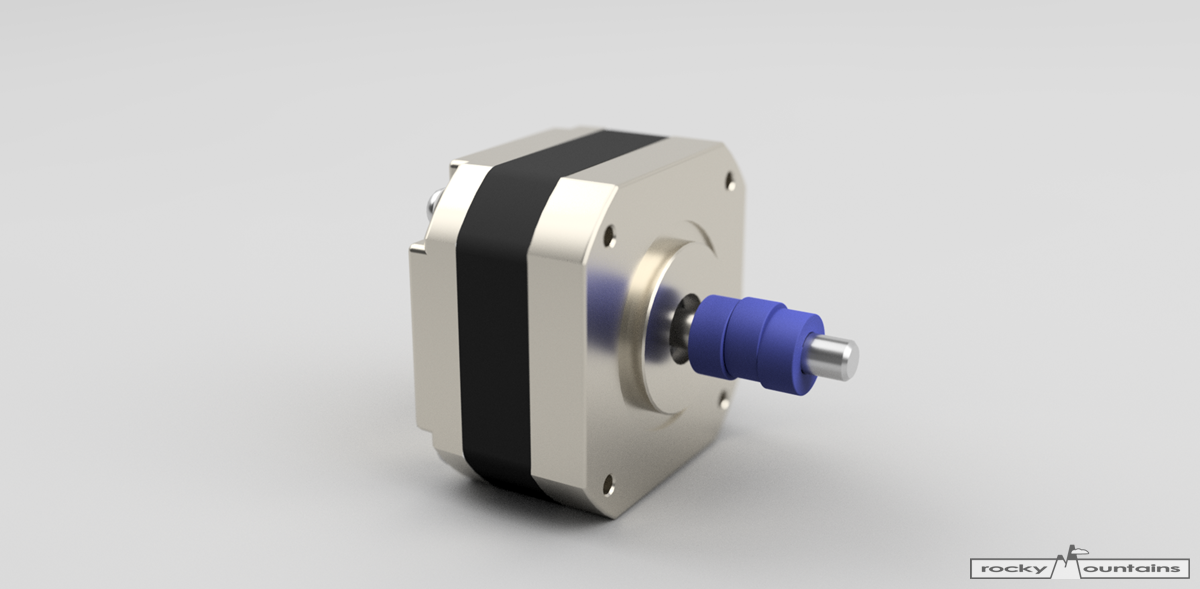
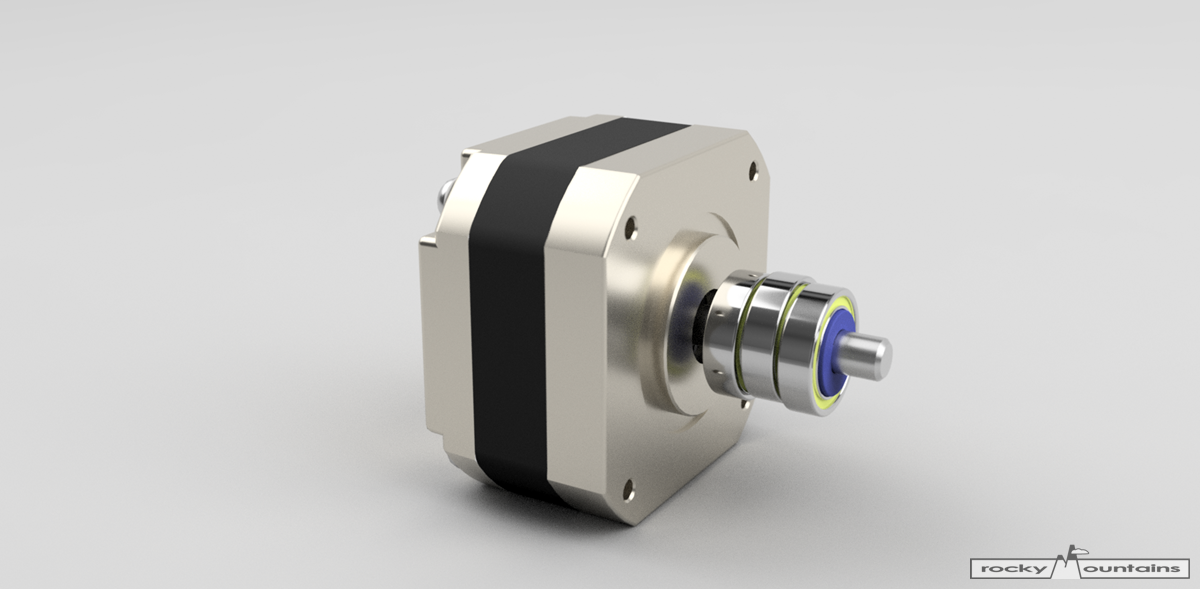
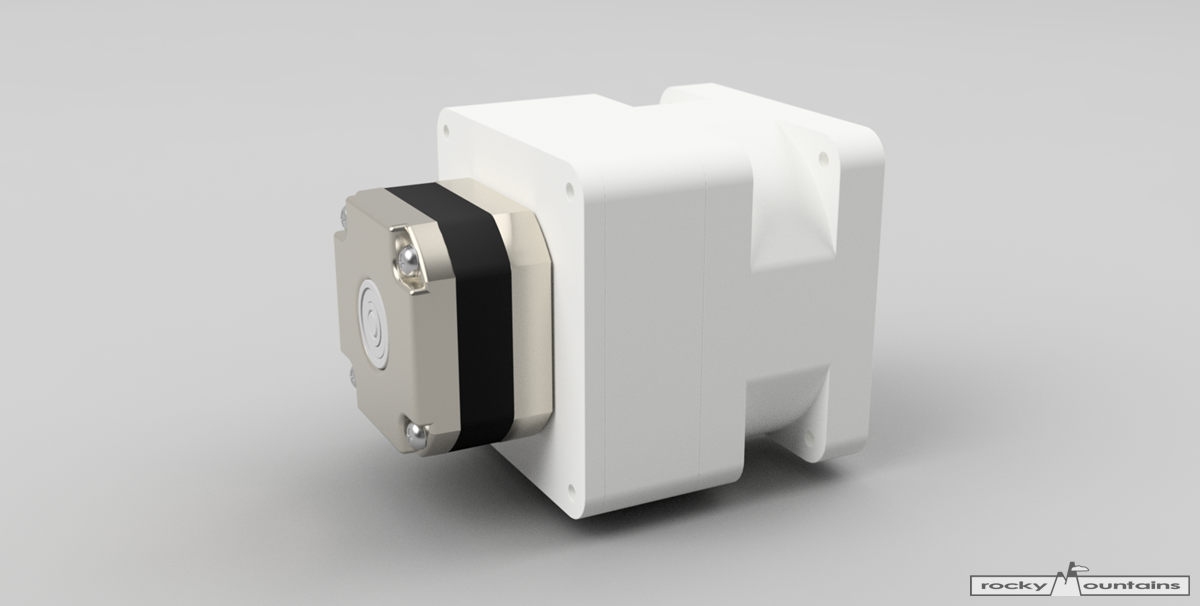
이 디자인을 이용해 렌더링을 해봤습니다. 아래는 NEMA17 모터에 Cycloidal 디스크 3개를 장착하는데, 3개의 디스크가 각 기어에서 다른 위상에 접촉하도록 캠이 각각 120도 씩 다른 위상을 갖고 있습니다.
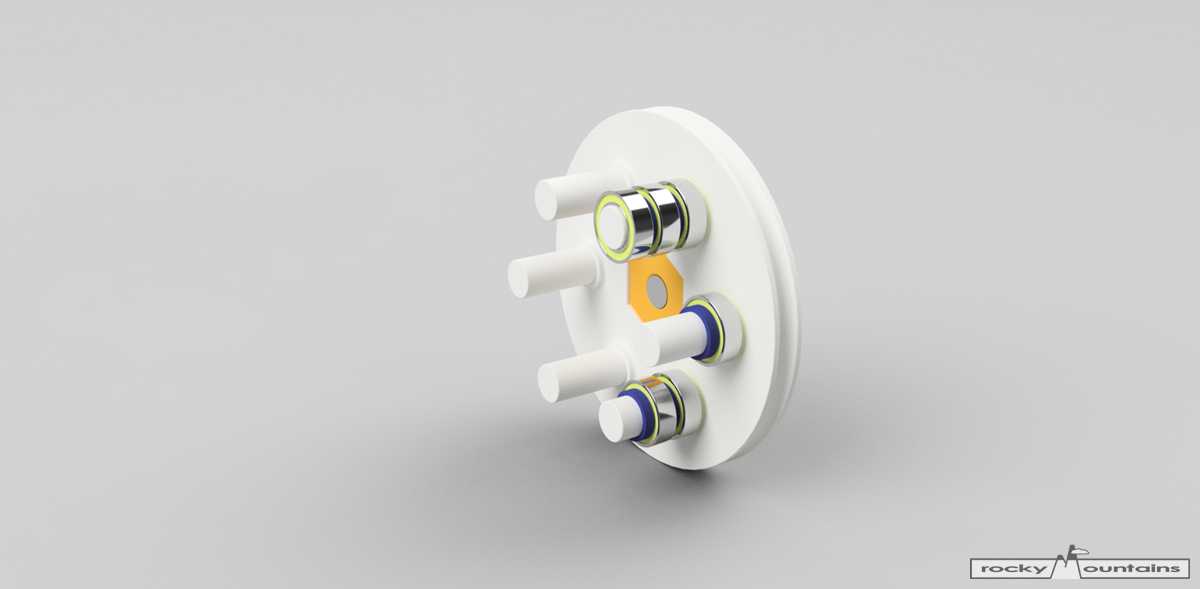
아래는 각각의 캠에 볼베어링이 장착된 모습이고…
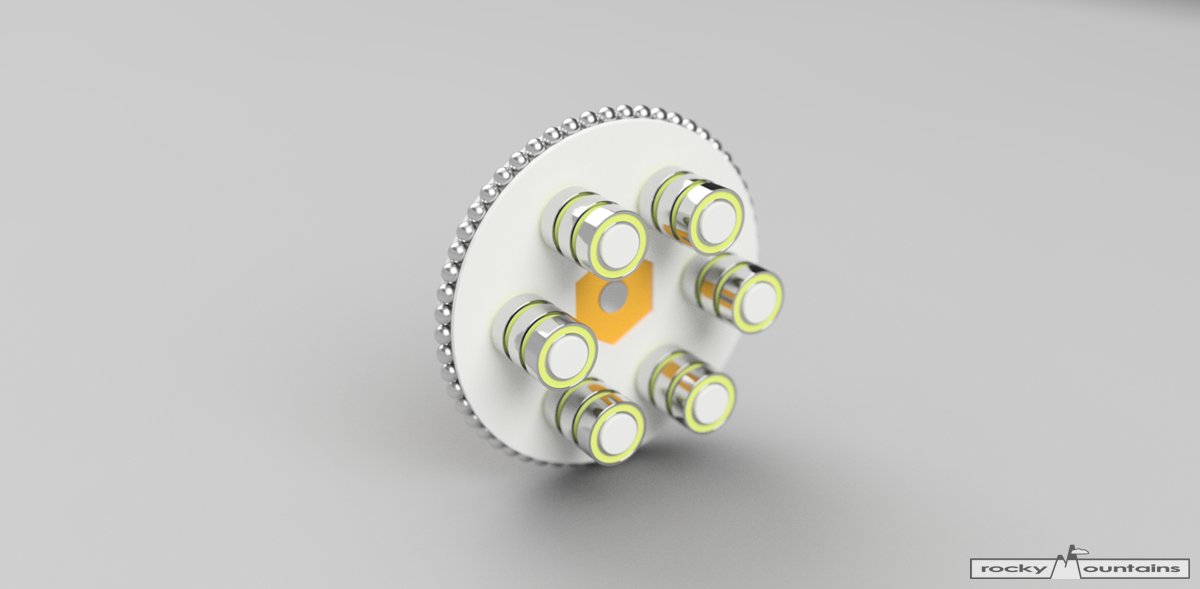
이 베어링에 3개의 Cycloidal 디스크가 장착되었습니다.
다음은 출력 디스크인데, 출력 디스크의 샤프트에는 Cycloidal Disk와 맞닿는 곳에 볼베어링을 설치하여 마찰력을 줄이도록 하고 있습니다. 역시 디스크가 3단이니까 베어링도 3개가 각각 설치되어 있습니다. 베어링 사이는 스페이서가 들어가 베어링간 간격을 유지합니다.
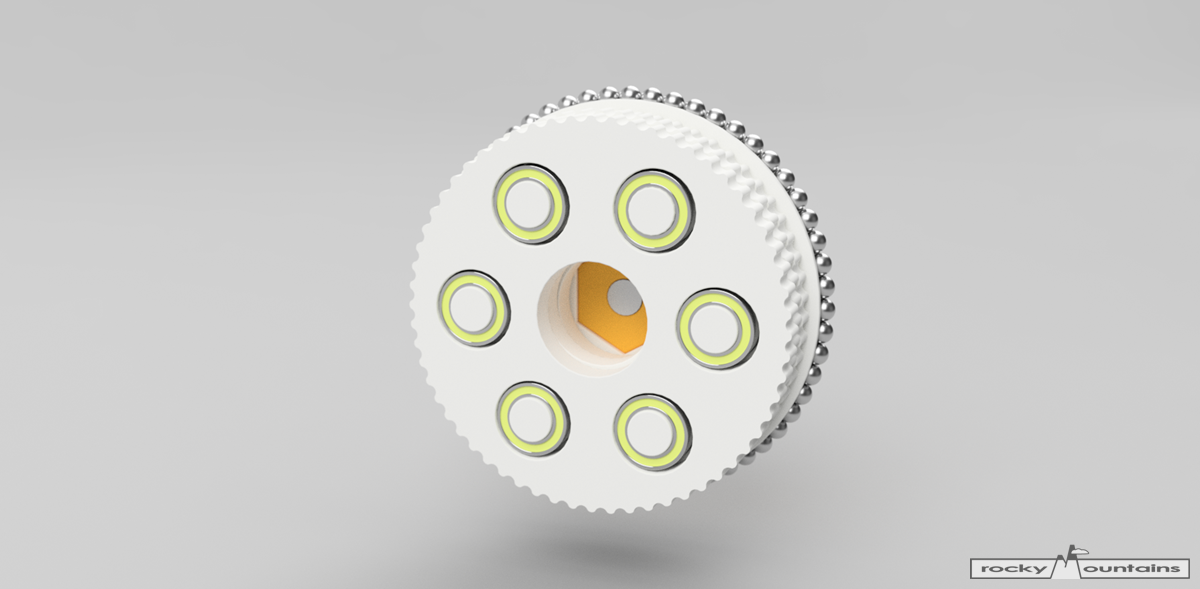
아래는 모든 베어링이 설치되고, 출력 디스크 주변에 베어링 볼이 배치되는 모습입니다. 출력 샤프트는 내구성을 위해, 5mm 금속 샤프트를 이용하기로 했습니다.
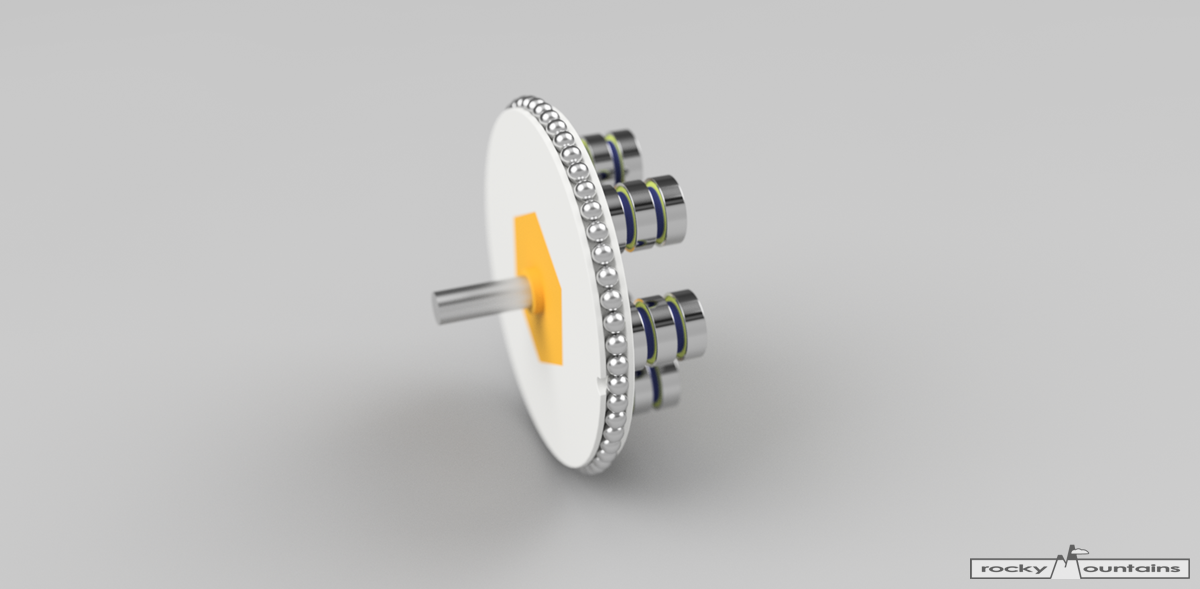
요거는 뒷모습입니다.
출력 디스크와 Cycloidal 디스크들이 모두 모이면 이런 모습이 될 겁니다.
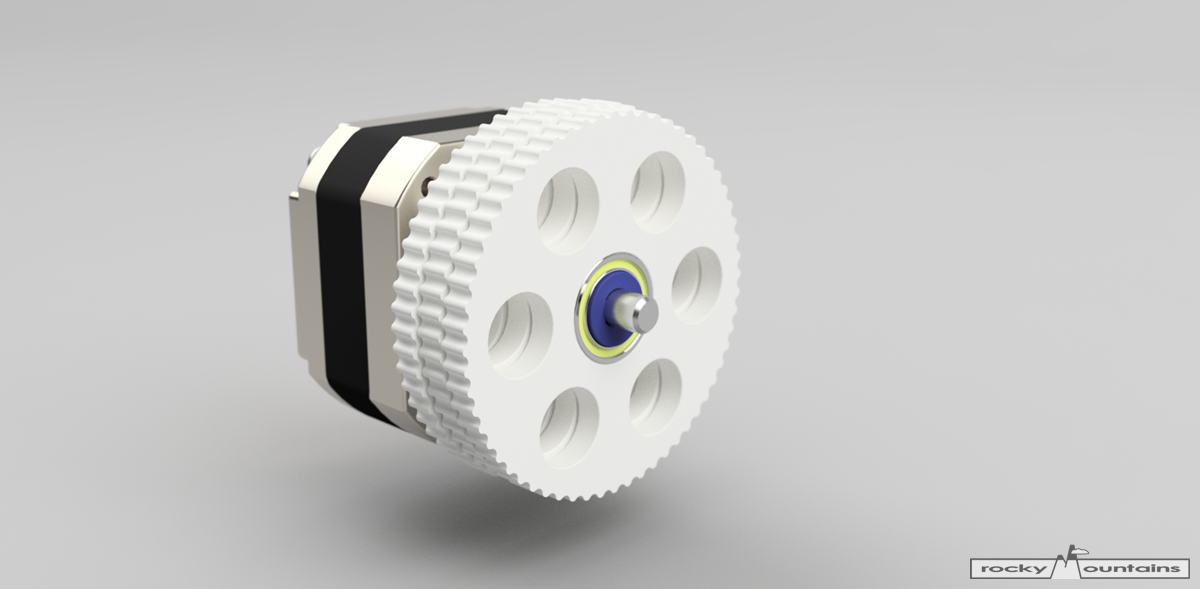
아래는 Cycloidal 디스크가 맞물려 돌아갈 핀 케이스하고 같이 있는 것입니다.

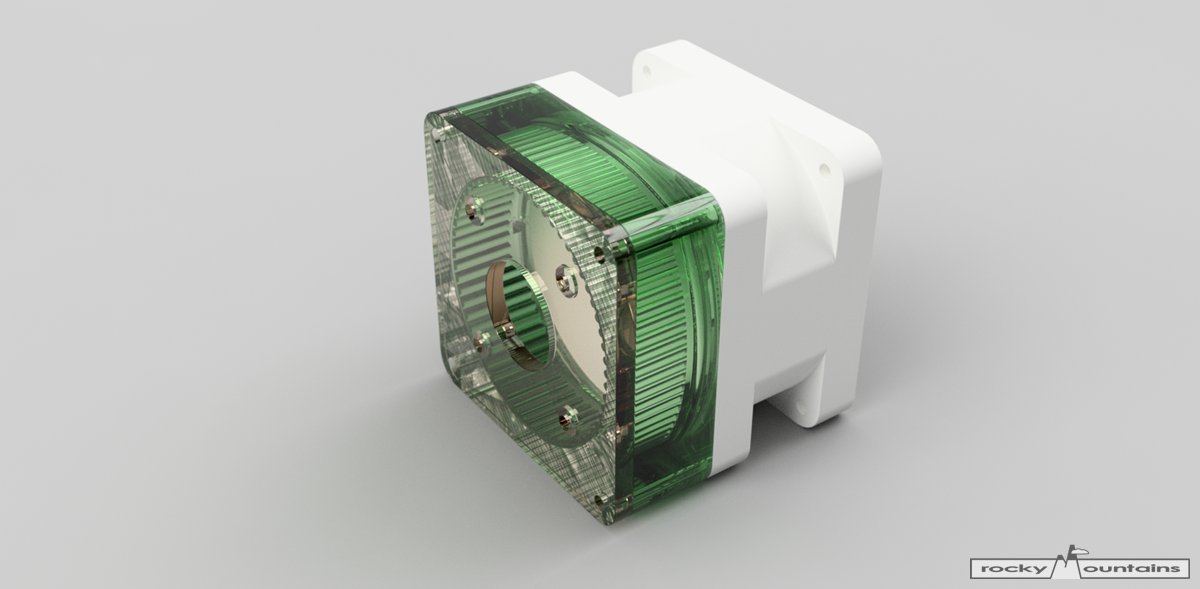
모터 마운트와 Cycloidal Pin 케이스, 샤프트 컬플러 케이스를 같이 모았습니다. 내부구조를 보여드리기 위해 심심풀이로, 모터 마운트와 Cycolidal Pin 케이스틑 투명 소재로 렌더링 했습니다.
모든 부품을 모두 조립했을 때 모습입니다. Cycloidal Pin 케이스 우측에 나중에 조립할 때, 베어링 볼을 투입할 지름 3mm의 구멍이 보입니다.
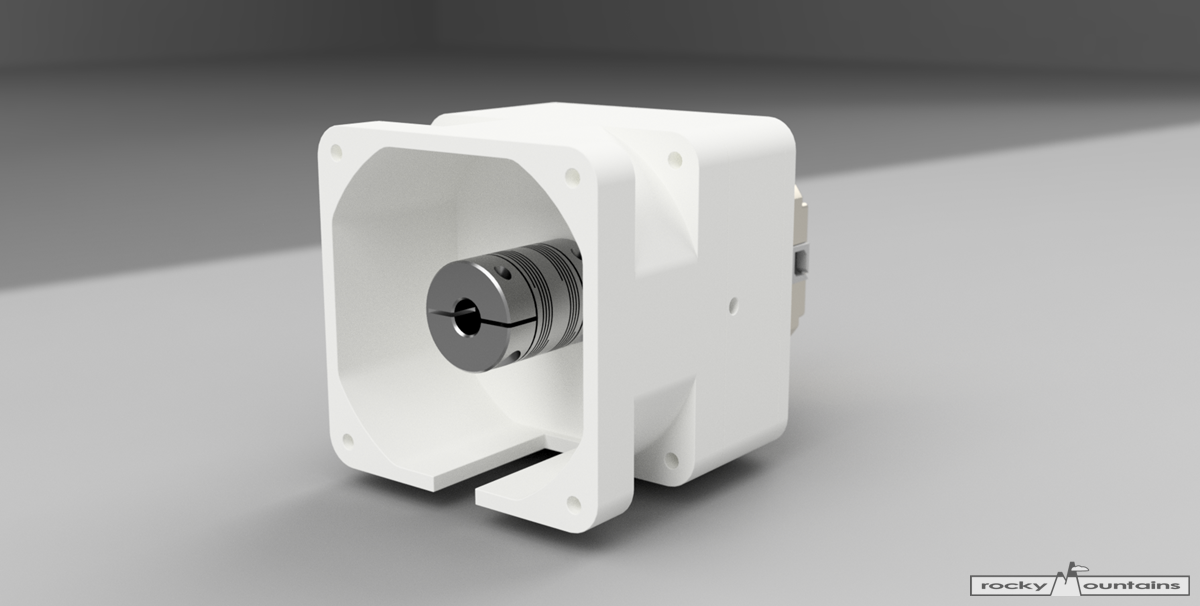
다른 각도에서 본 기어박스의 모습입니다.
일단 제작은 60:1 기어박스 하나를 제작해볼 예정입니다. 거기서 각속도가 착하고 일정하게 나오게 된다면, 여기에 1단을 더 추가하여 2단으로 총 3600:1 감속비를 갖는 기어박스를 제작할 계획입니다.
만약에 이번에도 안된다면…. 흠…. -___-;;;