이전 글에서 모터 타이밍을 테스트한 기본 바탕에는 900:1의 감속 기어를 구현한다는 것을 전제로 하고 있습니다.
뭐… 간단히 말하자면, 모터가 900바퀴를 돌면서 기어박스로 입력될 때, 출력은 딱 한바퀴 돌아야 하는 기어박스입니다.
이 정도의 감속비를 구현하기 위해선 가장 흔한 방법은 웜기어를 사용하는 방법입니다. 역시 이 방법은 시중에서 판매하는 스타 트랙커에 사용하고있는 방법입니다. 웜기어의 구조상 쉽게 파워를 낼 수 있고, 감속비도 엄청나게 높습니다. 시스템의 크기도 작아지구요.
웜기어로 만드는 것은 이래저래 마음에 쏙들지 않아서, 다른 방법을 모색하던 중에 발견한 것이 Cycloid Gear 또는 Reducer라는 방법입니다. 이건 일단 구동하는 것 부터 무지하게 독특합니다.
일단 실제 돌아가는 모습부터 보겠습니다.
외측 기어가 있고, 내측기어가 있는데, 일반적인 평기어처럼 기어의 중심축이 고정된 것이 아니고, 내측기어의 이빨이 적고 내측기어가 작동하면 중심부가 이동을 합니다. 이 기어의 경우 높은 기어비를 내기 위해 이빨은 하나 적게 하는데, 내측의 기어는 외측기어와 중심축이 같은 동심원이 아니고, 또 내측기어의 중심이 계속 바뀌면서 외측기어 주변을 빙빙 돌아가며 맞물려가는데, 내측기어의 이가 하나 적기 때문에, 모터가 한바퀴 돌면 내측기어 이빨 하나만큼 어긋나면서 내측 기어가 돌아갑니다. 모터가 다시 한바퀴 돌면 내측기어는 다시 이빨 하나만큼 더 돌아가고… 그래서 내측 기어의 이빨이 30개라면 모터가 30바퀴를 돌아야 겨우 내측기어는 한바퀴를 회전하게 됩니다.
이 방법은 모터가 중심축에서 벗어나 자동차 엔진의 캠 같이 회전 중심이 변하면서 내측기어를 돌려주게 됩니다. 이 기어 시스템의 출력은 내측 기어의 회전에서 오는데, 이 내측 기어 자체가 기어의 중심이 빙빙 도는 형태라, 출력중심축을 뽑아내는 것도 좀 독특한 형태를 가지게 됩니다.
어쨌든 이 기어의 경우 일반 평기어처럼 힘으로 부딛혀 밀어내는 형태가 아니고, 기어 이빨 사이로 미끌어져 들어가는 형태로 스트레스가 적어 기어의 수명이 길고 적은 공간으로도 높은 기어비를 만들 수 있다고 합니다.
아래 동영상은 이 Cycloid Gear를 설계하고, 어떻게 작동하는지 보여주는 아주 좋은 동영상입니다.
자 … 이렇게 하여, 30:1 기어비를 갖는 Cycloid Gear를 2단으로 구현하면 900:1의 감속비를 갖는 기어박스를 구현하게 됩니다.
그럼 먼저 기어를 설계해야 하는데… 역시 세상에는 멋진 사람들이 많습니다.
이미 알려진 이 기어의 설계를 수치화하여 OpenSCAD의 스크립트로 내측기어와 외측 기어를 만들어내는 프로그램이 있습니다. 내가 원하는 이빨수를 넣으면 거기에 따라 이 기어를 만들어 줍니다. 출력은 STL 또는 DXF 파일로 만들어낼 수 있습니다.
물론 이렇게 해서 내가 딱 원하는 모습을 뽑는게 아니라, 가져온 기어의 이빨의 디자인과 중심축에 대한 정보만을 얻어서 내게 필요한 구조는 따로 수립해야 합니다.
스크립트는 아래에서 다운받을 수 있습니다.
http://www.thingiverse.com/thing:8348
그리고, 아래 동영상을 보면 2단으로 구성하는 Cycloid Gear를 보여주는데, 하나 재미있는 것은 , 1차로 내측기어가 고정된 외측 기어를 돌면서 회전하며 1차 감속을 하는데, 이 1차 내측기어와 같은 중심으로 같이 움직여주는 2차 내측기어가 2차 외측기어를 밀치면서 2차 출력을 만들어냅니다. 그럼 2차 외측기어의 경우는 중심이 회전하지 않는 모터와 동심 축을 만들어 줍니다. 일이 아주 간단해 집니다.
아래 동영상을 보십시오.
아래 동영상은 10:1 감속비를 갖는 Cycloid Gear를 2단으로 배치하여 100:1의 감속비를 갖는 기어박스를 시뮬레이션 하는 모습입니다.
아래는 이와 똑같은 원리로 움직이는 기어박스입니다.
자.. 그럼 원리는 파악했고, 디자인도 할 수 있는 방법이 있으니, 이제 900:1 감속비를 갖는 기어박스를 디자인해보겠습니다.
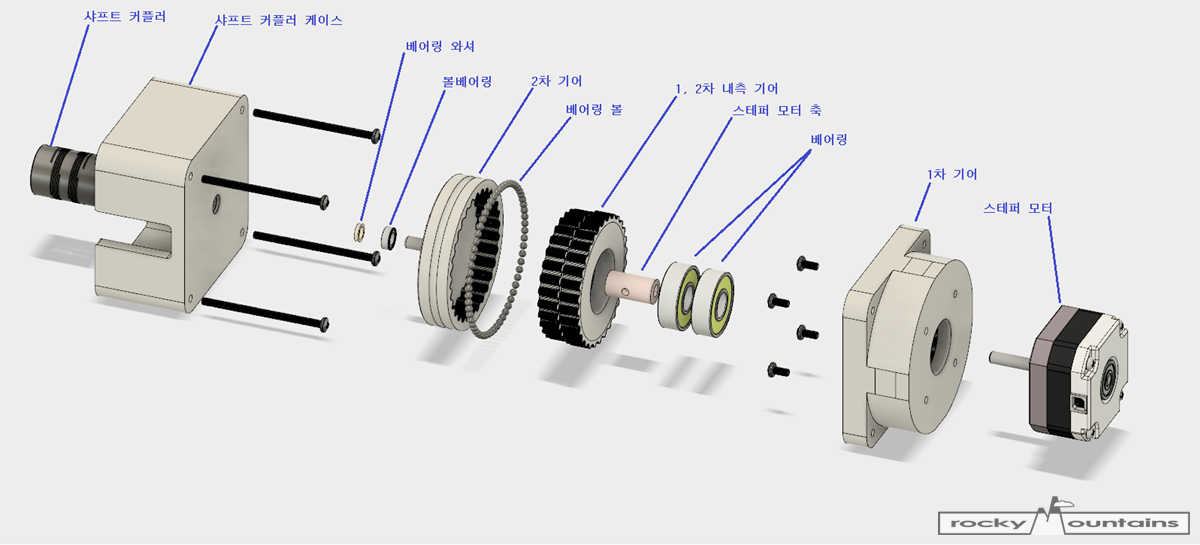
아래는 1차 설계입니다.
제작은 제가 가지고 있는 3D 프린터로 제작할 예정입니다. 다만, 아주 내구성 좋은 플라스틱이 아니기 때문에, 가능하면 마찰을 줄이기로 했습니다. 플라스틱이 닿는 회전 축 같은 곳엔 모두 볼베어링을 사용하였고, 2차 외측기어 주변엔 베어링용 볼을 넣어서 마찰을 감소시키도록 했습니다.
모터는 비교적 작은 모터인 NEMA 17 규격의 스테퍼 모터를 이용합니다.
보시는 것처럼, 1, 2차 내측 기어는 하나로 붙어있고, 기어박스에서 출력된 축에는 샤프트 커플러를 장착하여, 나중에 스타 트랙커의 축과 연결하도록 되어져 있습니다. 전체적으로 볼륨감이 있지만, 실제 기어박스 자체는 작습니다. 샤프트 커플러 케이스 때문에 커 보일 뿐입니다. ㅎㅎㅎ
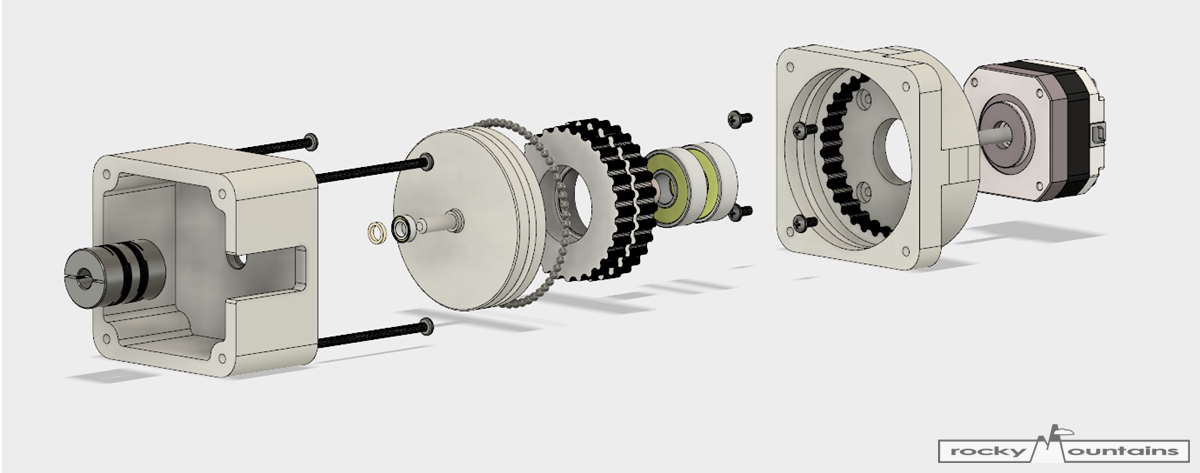
아래는 다른 방향에서 본 부품들의 모습입니다.
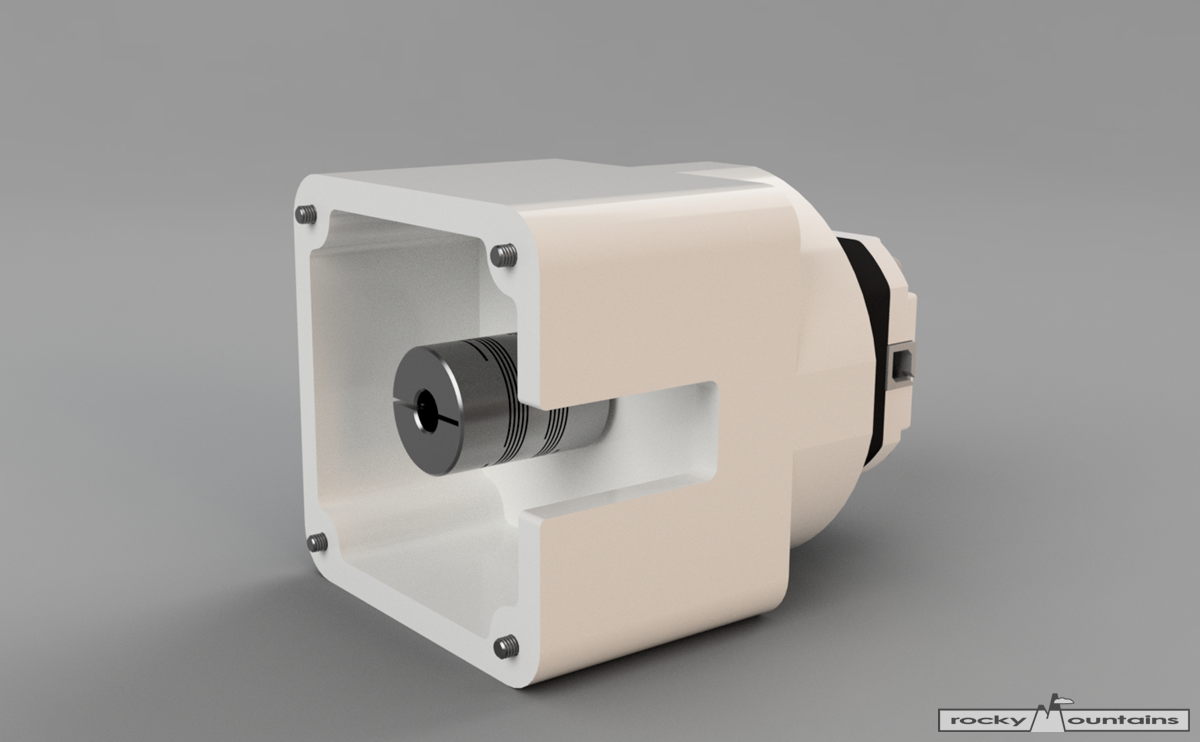
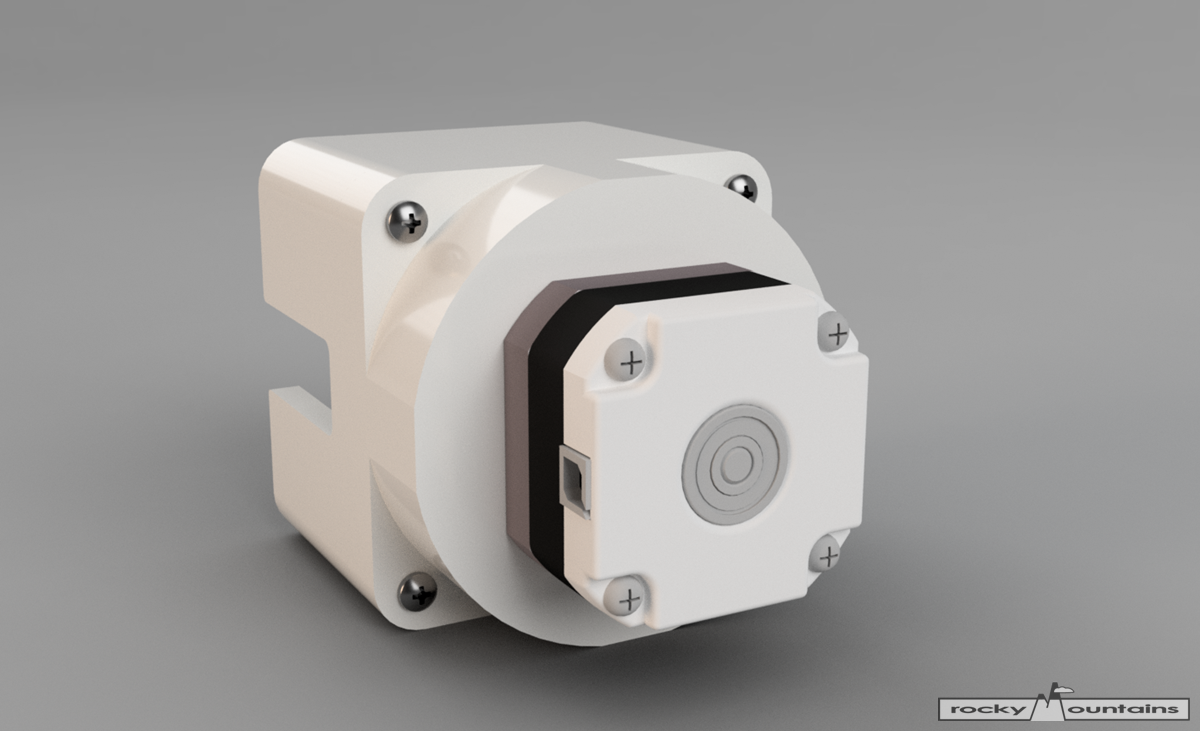
아래는 디자인은 마치고 전체적인 모습을 랜더링해봤습니다. 모터를 제외한 박스의 길이는 약 65mm 이고, 박스의 가로세로는 각각 68mm 정도입니다.
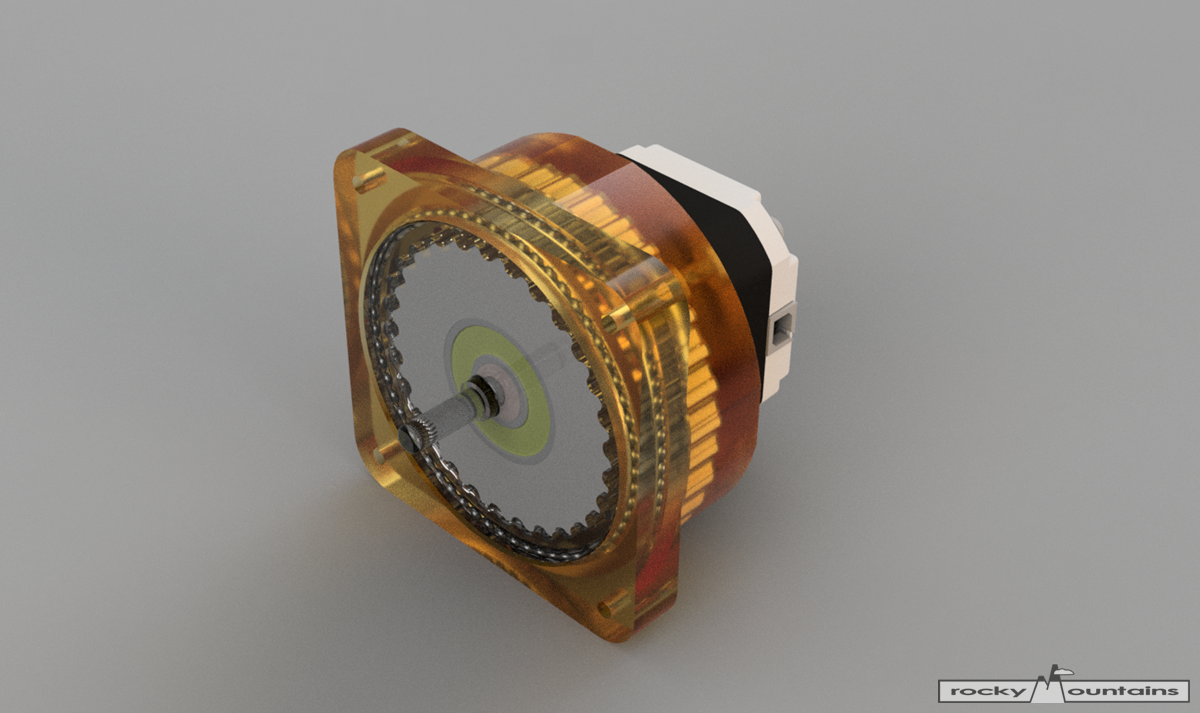
아래는 기어박스 부분만 보여주고 있습니다. 기어 내부를 보이게 하기 위해, 렌더링 할 때, 1차 외측기어를 투명하게 해봤습니다.
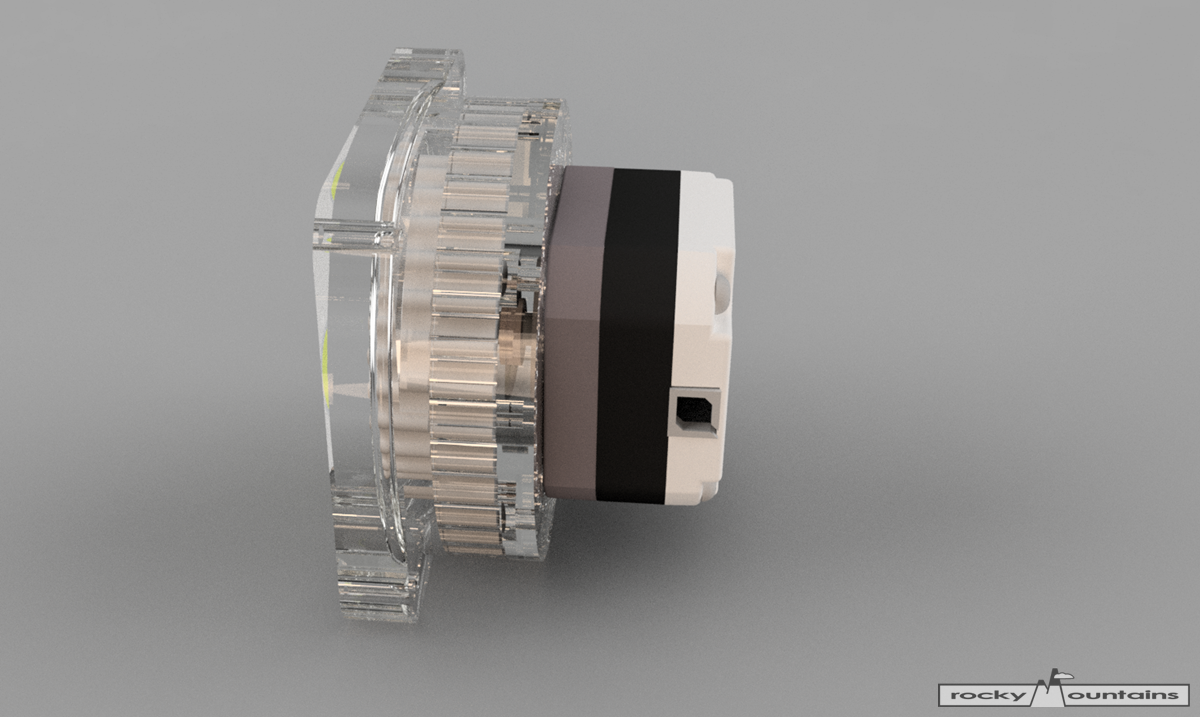
기어박스의 1차 외측기어, 2차 외측기어를 투명하게 해봤습니다. 구조가 좀더 잘 보이려나요? 2차 외측기어 주변으로 들어간 베어링 볼들도 잘 보입니다.
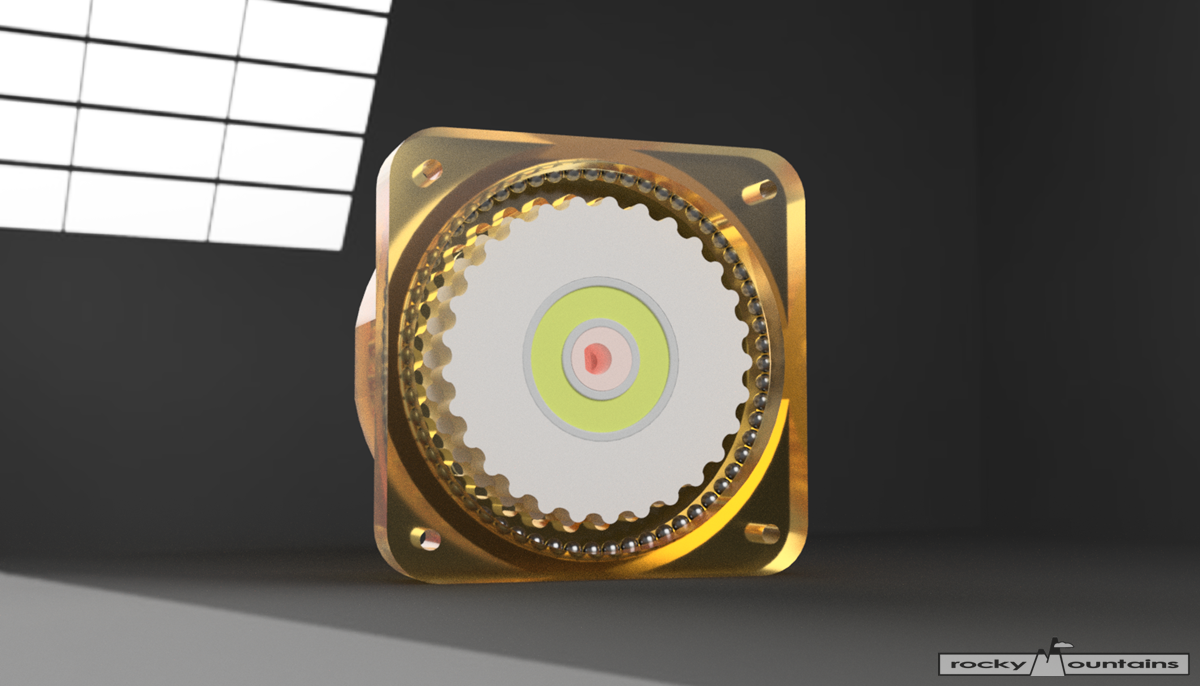
아래는 1,2차 내측기어를 정면에서 보여주고 있습니다. 모터축이 중심에서 약간 벗어나게 한 모습이 잘 보이네요. ^^
이제 디자인이 어느정도 됐으니 한번 제작해봐야겠습니다.